Perception
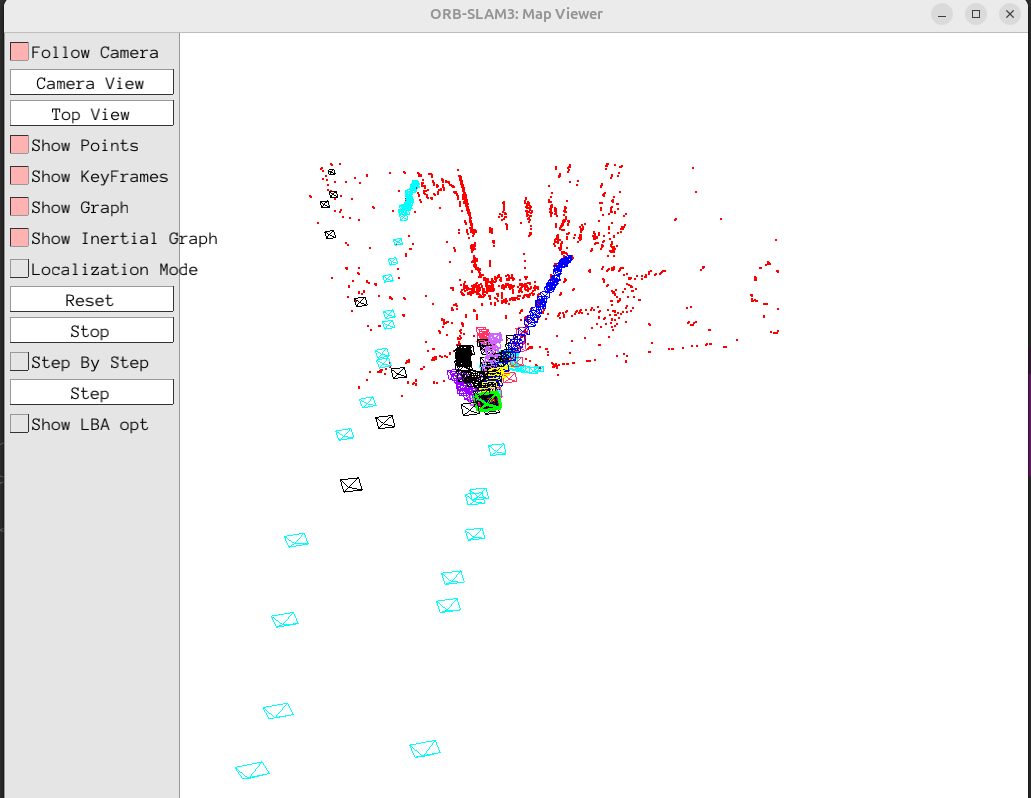
Perception is the stack of estimation and detection components that turns raw sensor data into useful state and measurements. It combines visual odometry / SLAM, inertial fusion, and learned models where they add clear value.
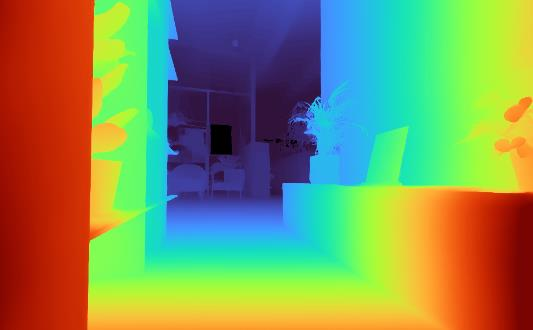
Perception is the stack of estimation and detection components that turns raw sensor data into useful state and measurements. It combines visual odometry / SLAM, inertial fusion, and learned models where they add clear value.