Overview
Welcome to the Rumarino Software documentation! This documentation provides an overview of the Rumarino Autonomy Stack, an open-source software stack for autonomous vehicles developed by Rumarino.
Explore the different Solutions we offer, and the different components of our software stack, including perception, planning, control, and simulation components.
-
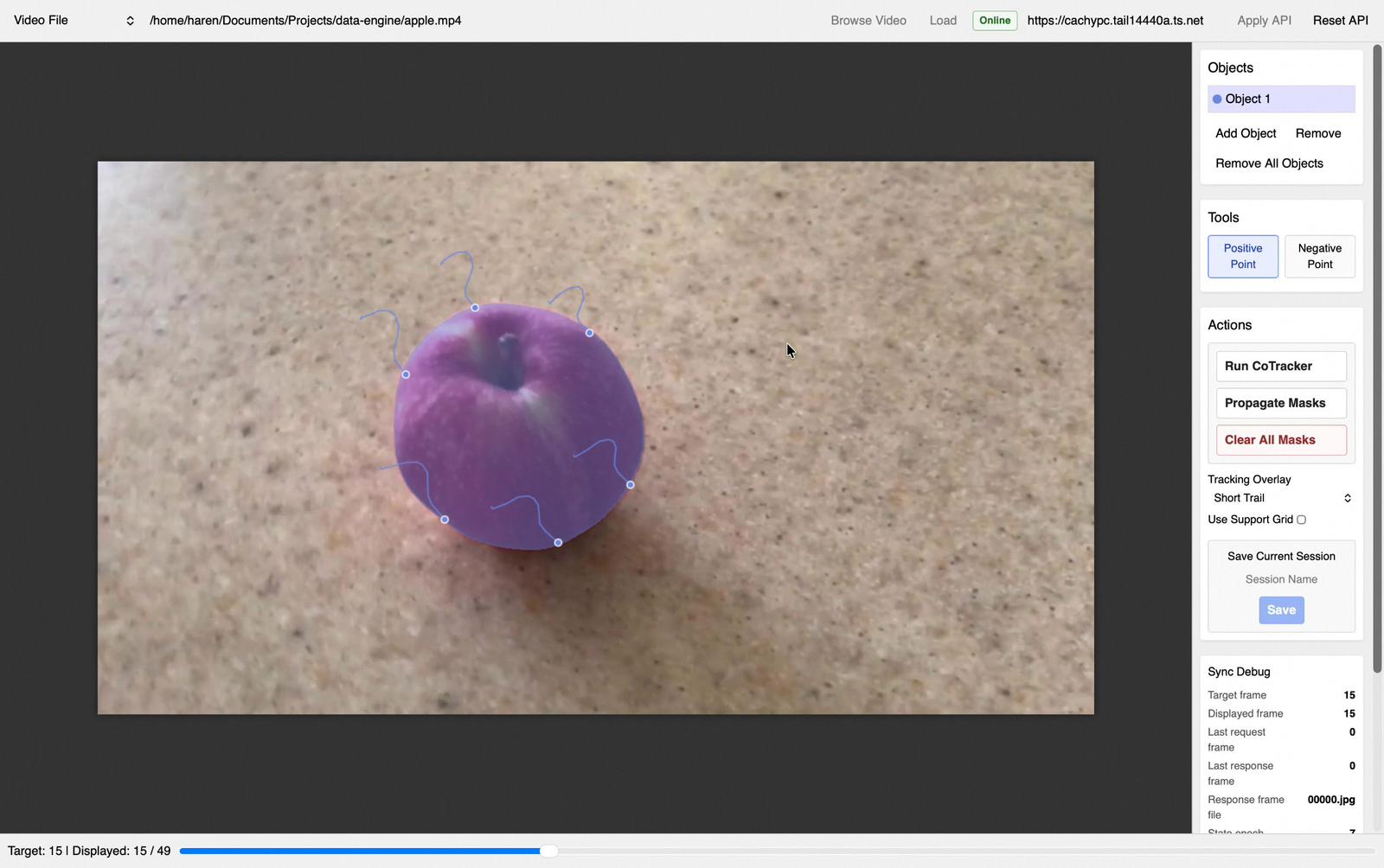
Full-stack web application for dataset management and labeling, designed to accelerate training workflows with practical AI-assisted tooling.
-
Tools and techniques that reduce the simulation-to-real gap with repeatable evaluation, calibration-aware testing, and robust transfer workflows.
-
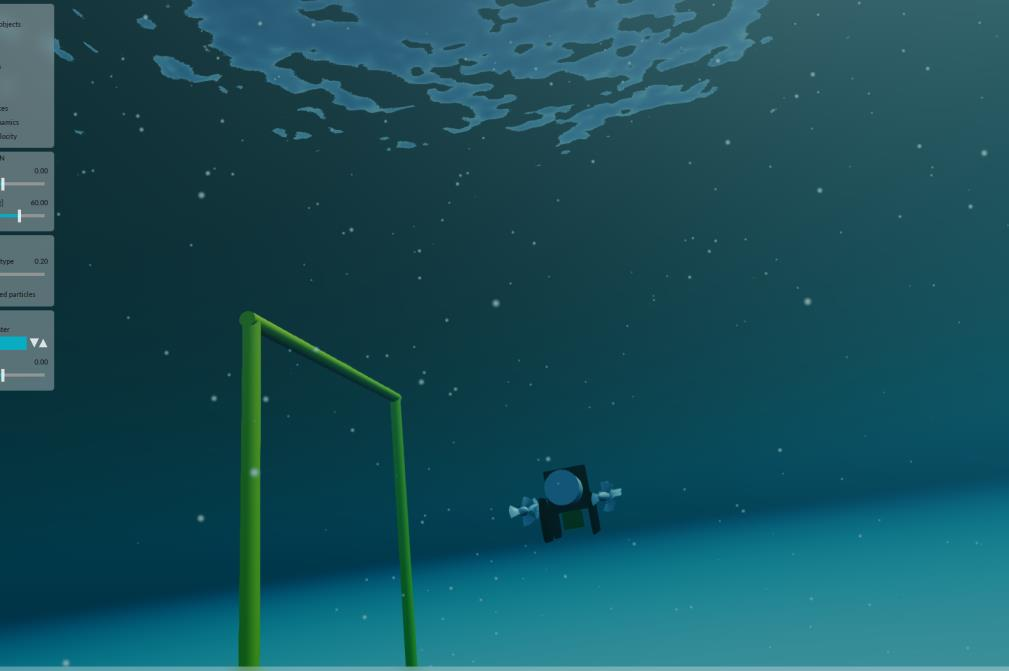
Stonefish Simulation integrated into the autonomy stack so you can run missions end-to-end in realistic underwater scenarios with AUV models and sensor pipelines.
-
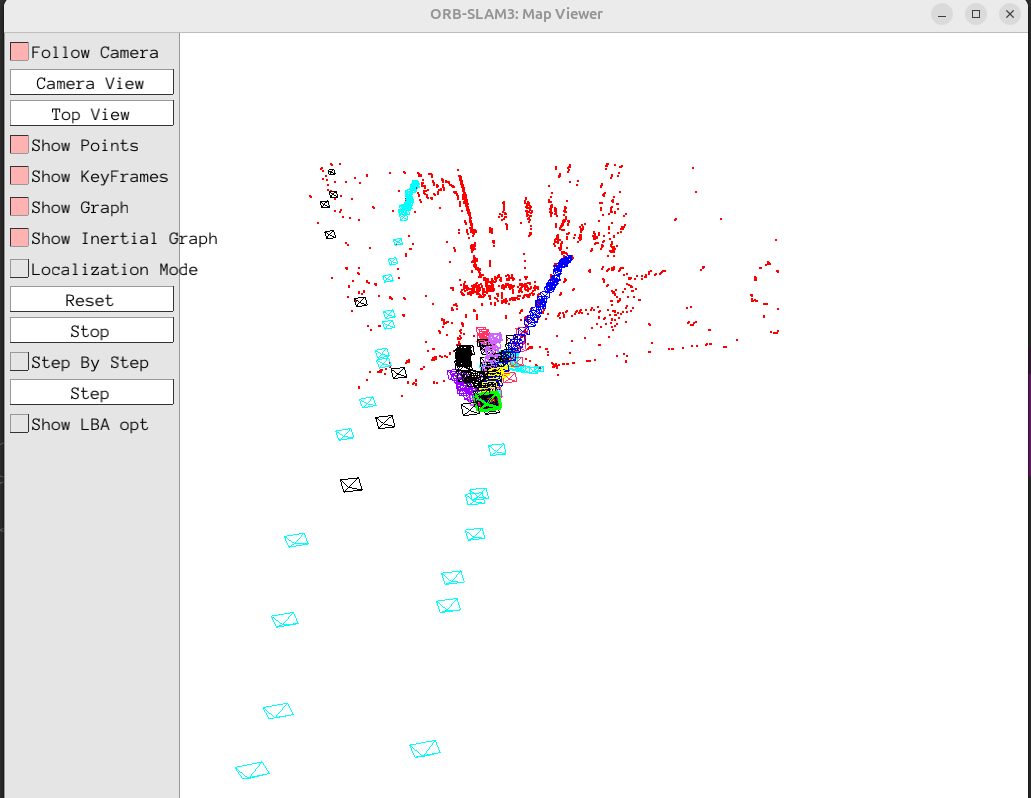
Estimation and perception pipeline that turns sensors into usable state using visual odometry / SLAM, inertial fusion, and learned models where they help.
-
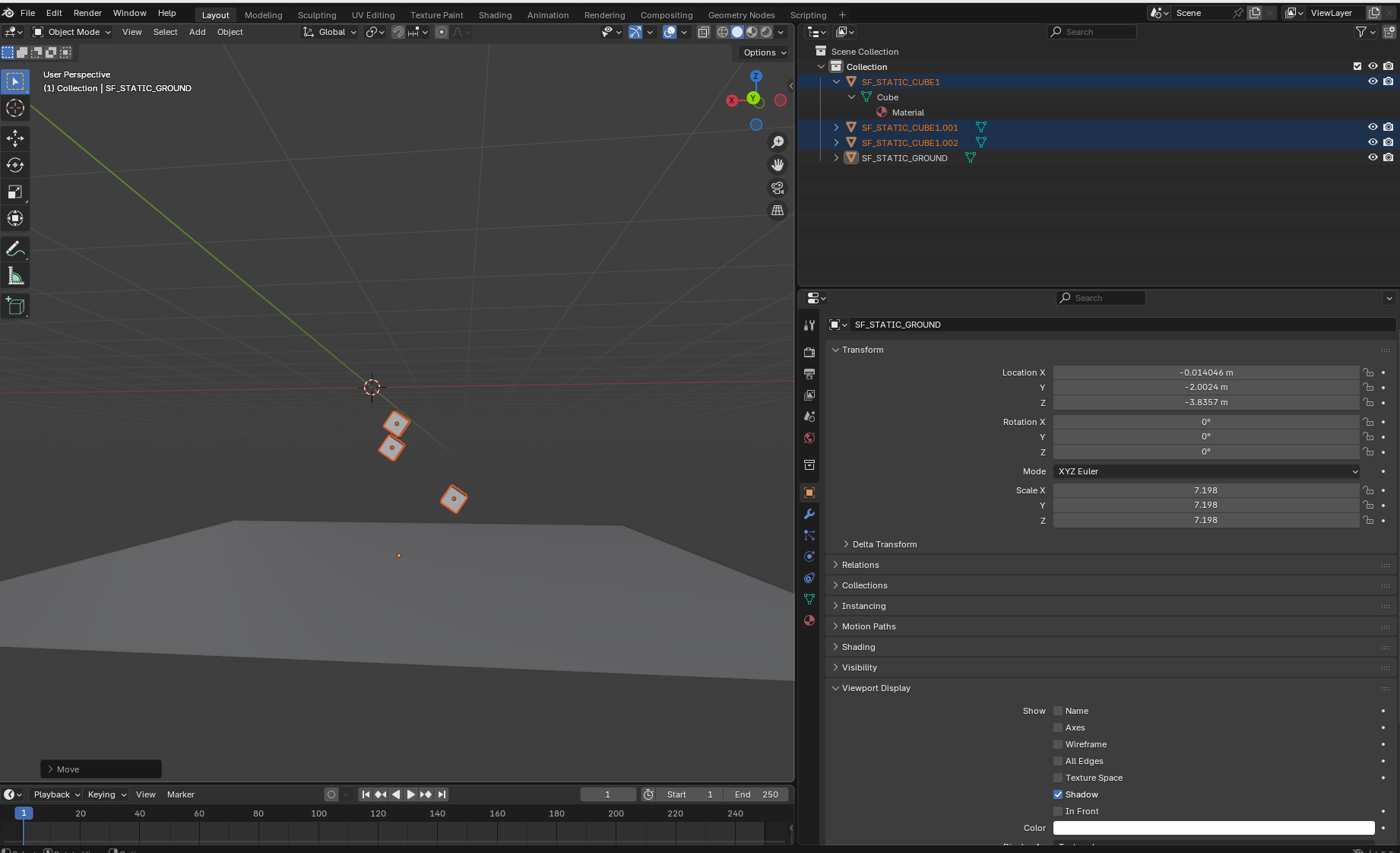
A Blender-to-Stonefish workflow to quickly create and export simulation assets, keeping environments and vehicle models reproducible.