
Data Engine
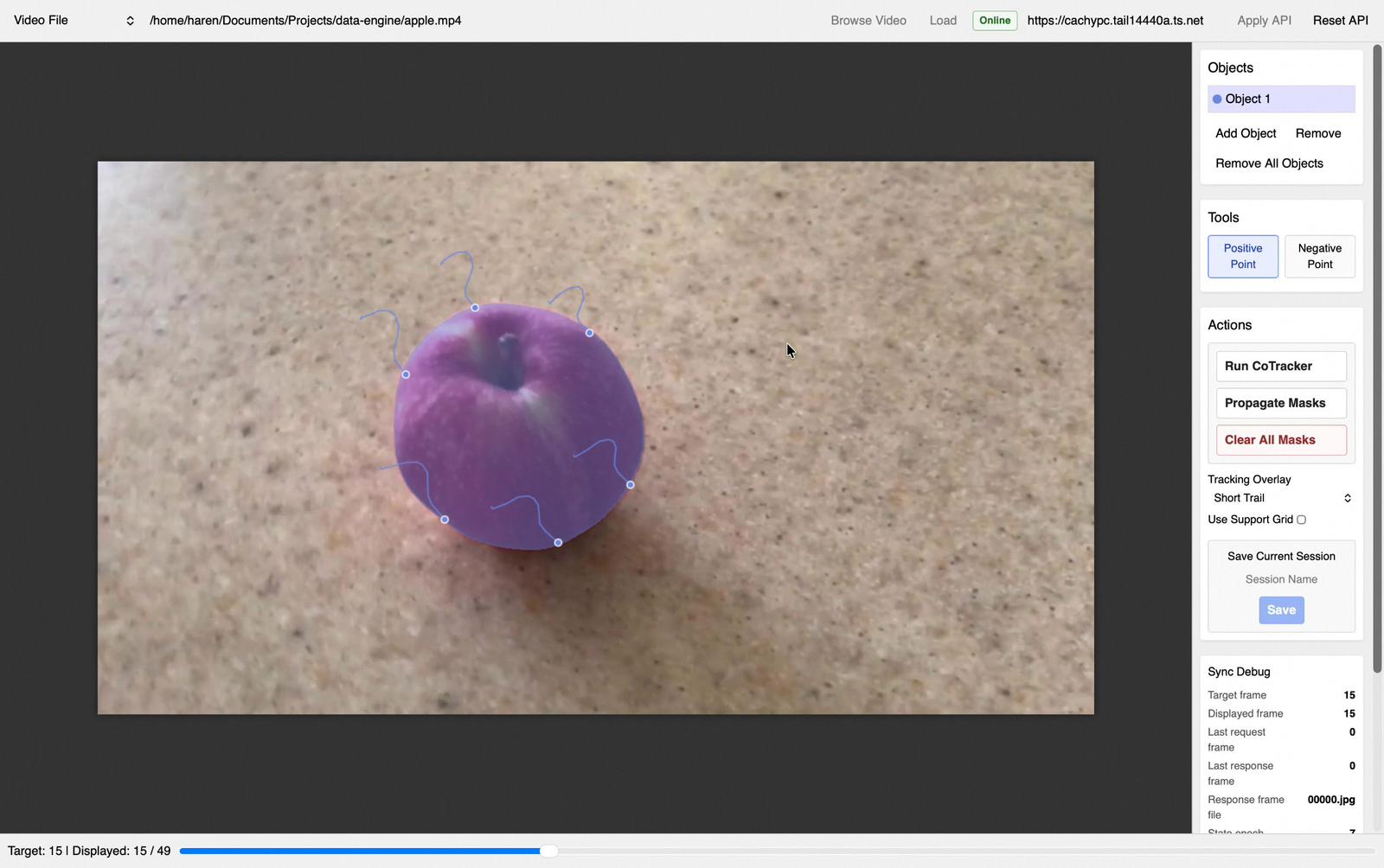
Full-stack dataset management and labeling for faster perception training, with human-in-the-loop workflows and foundation-model assistance.
Read Documentation
Technical overview of the RUMarino Autonomy Stack: the open-source software system that connects perception, simulation, mission execution, control, hardware bridges, and data workflows for autonomous underwater vehicles.
Full-stack dataset management and labeling for faster perception training, with human-in-the-loop workflows and foundation-model assistance.
Domain randomization, calibration-aware testing, and repeatable evaluation utilities that reduce the gap between simulation and pool testing.
Stonefish scenarios for Hydrus, Proteus, BlueROV2, and Girona500 that make end-to-end mission testing possible before hardware runs.
Mission logic, planning, and vehicle control components built as simple, testable blocks for both simulated and real AUVs.
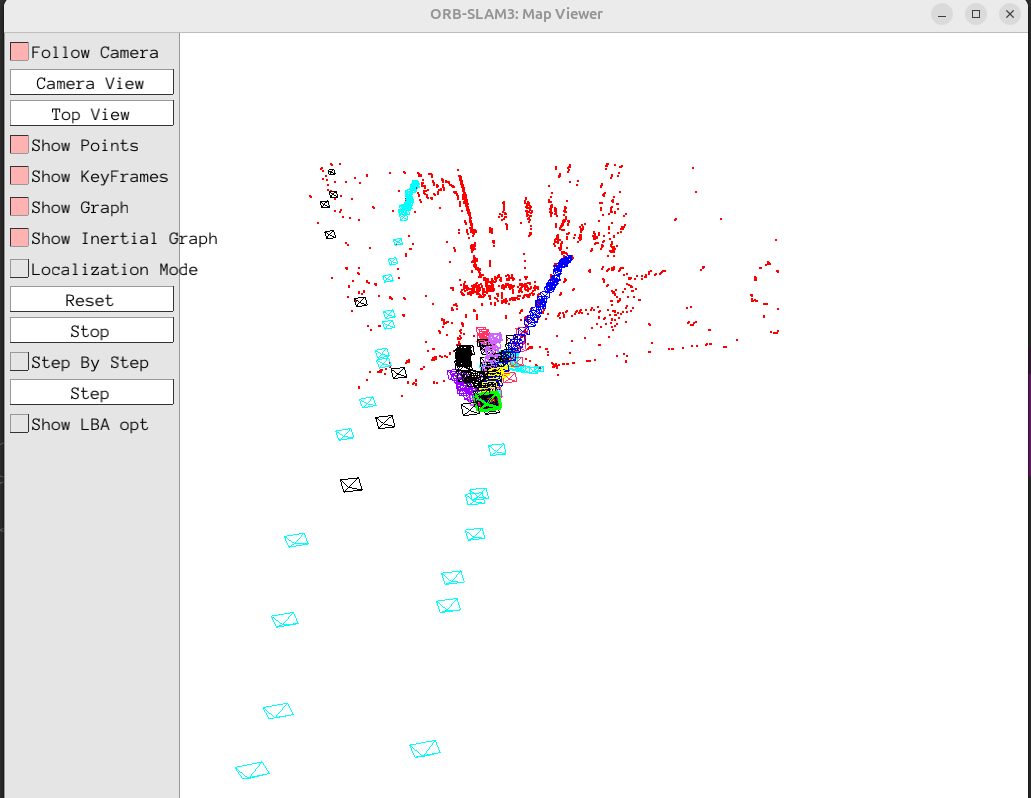
Visual odometry, SLAM, inertial fusion, object detection, and learned models that turn camera and IMU streams into actionable state.
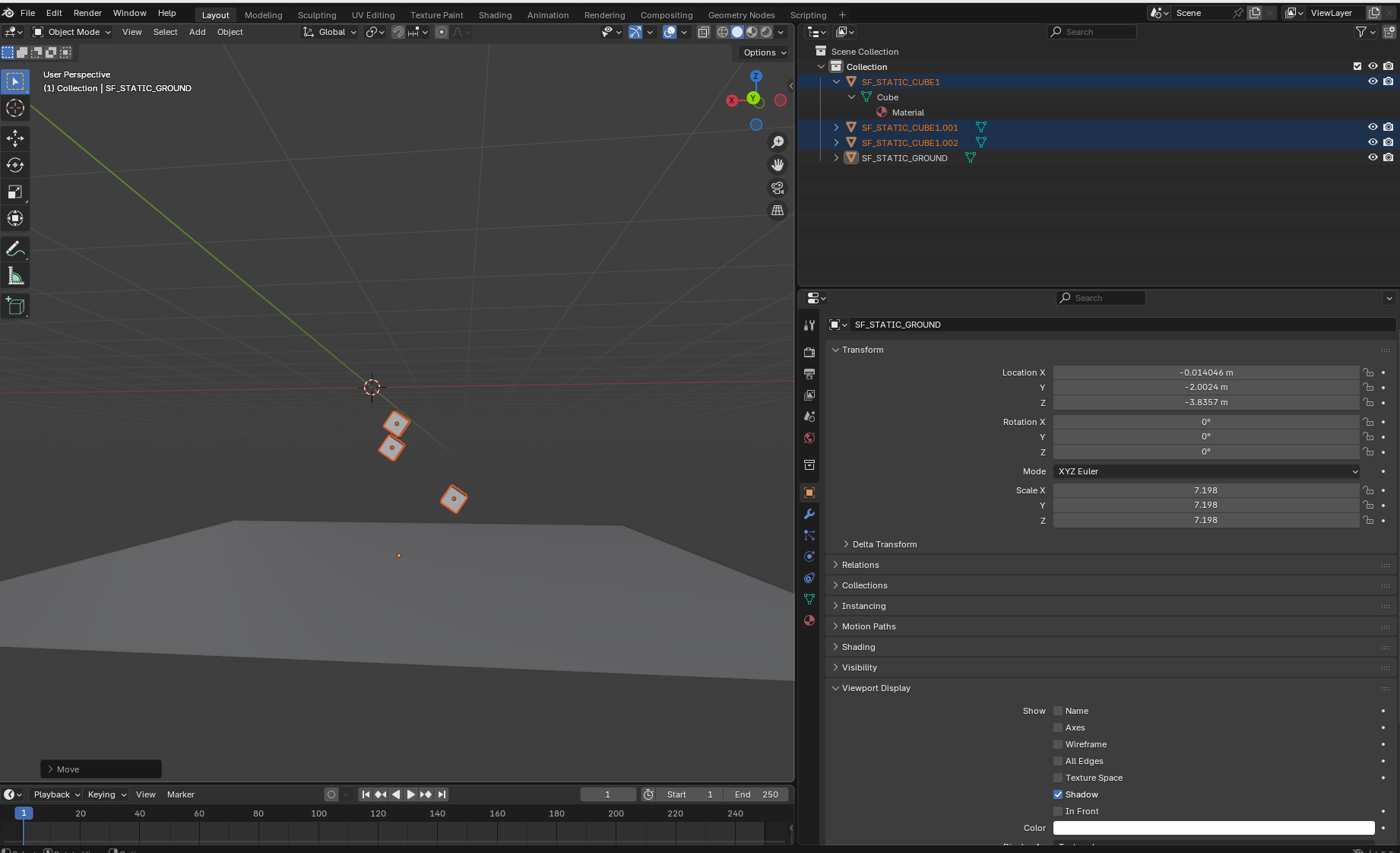
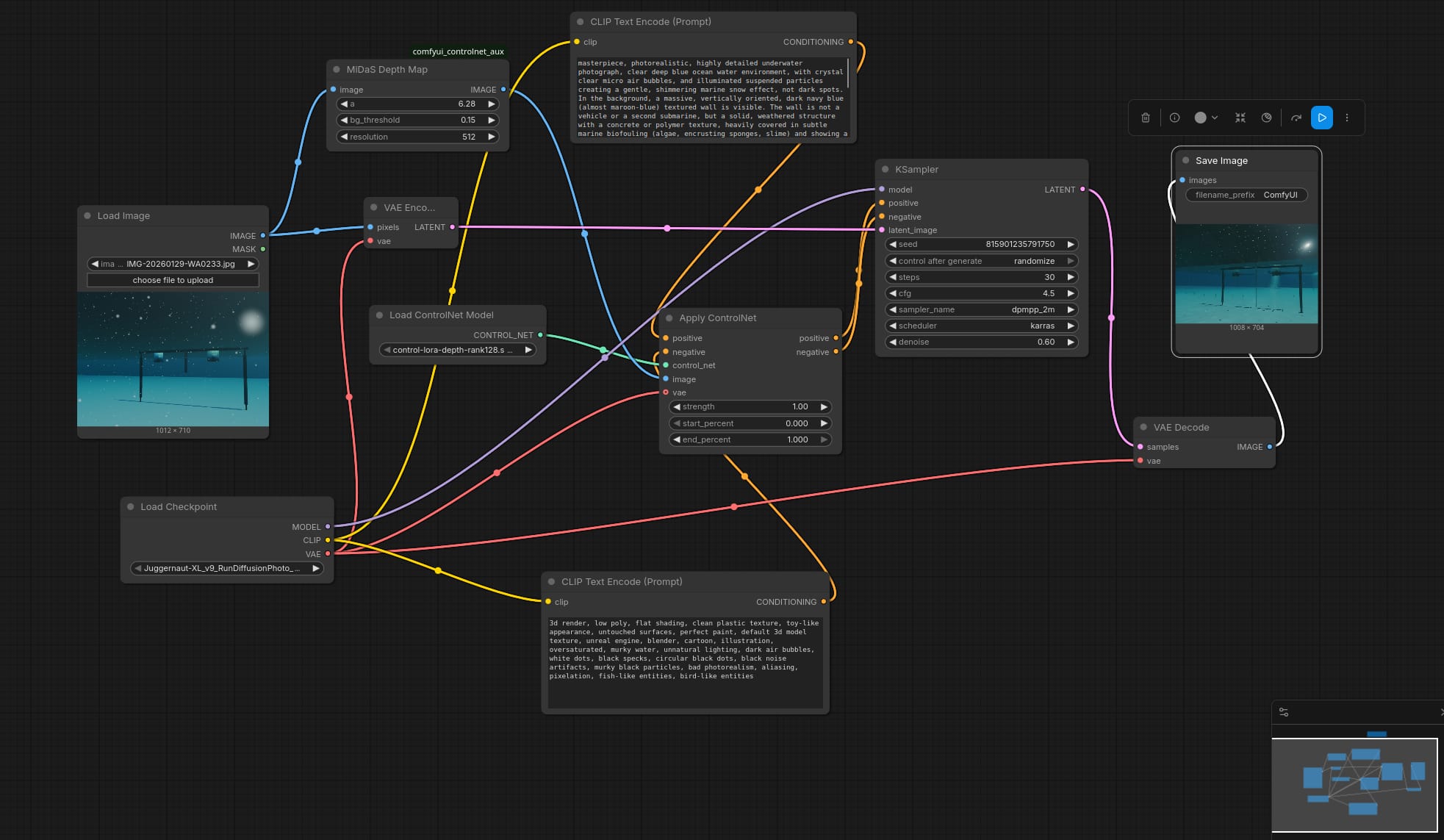
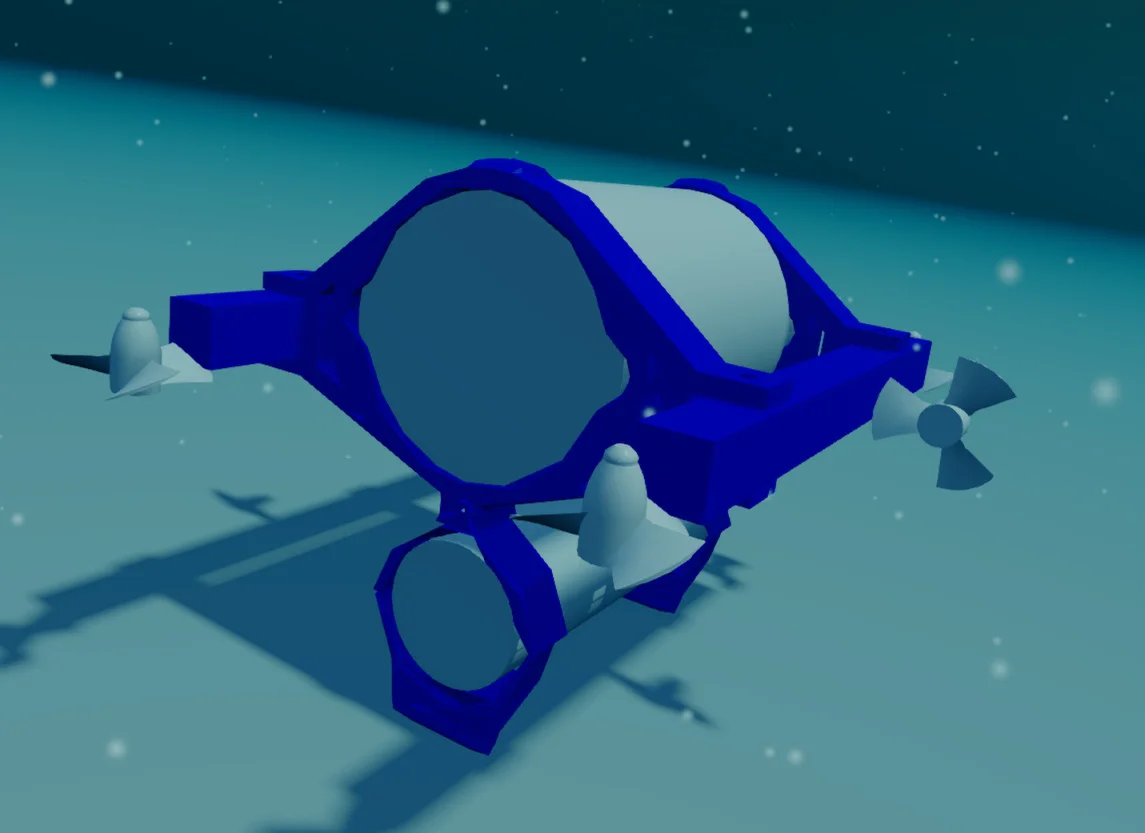
A reproducible authoring pipeline for exporting simulation assets, AUV models, and underwater environments from Blender into Stonefish.