
HYDRUS
Our latest generation Autonomous Underwater Vehicle, engineered for excellence.
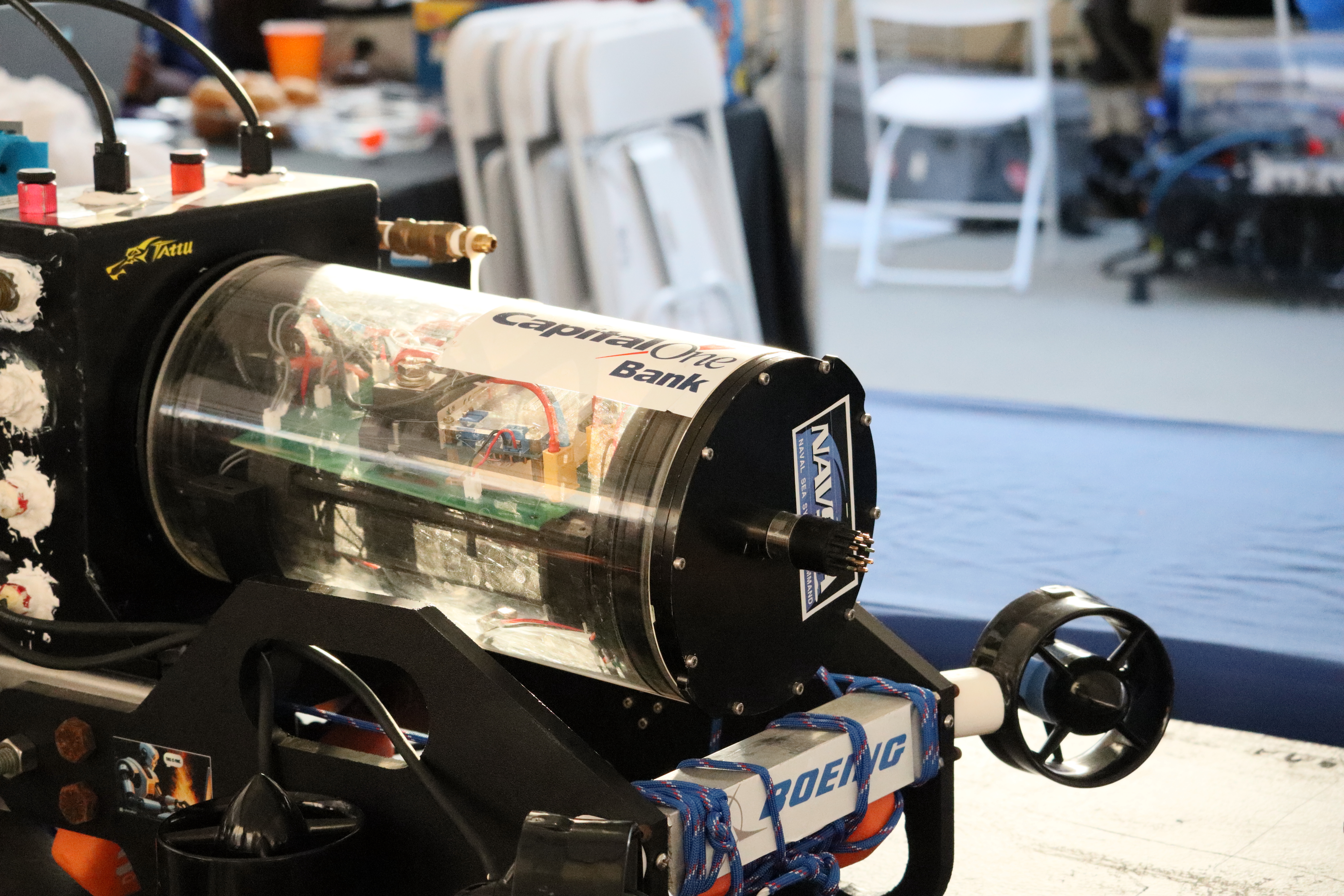
Mechanical Design
Hydrus features a dual-hull architecture combining aluminum and acrylic compartments. It integrates a precision claw system, a forward-facing ZED 2i camera with enhanced mobility, and a torpedo launching mechanism designed for competitive performance.

Electrical Systems
Powered by a dual-phase voltage system, Hydrus uses a custom PCB to efficiently distribute energy. Integrated protection systems ensure reliability while supporting thrusters, onboard computers, and advanced subsystems.